Viscosity grooves benchmark
Viscosity grooves benchmark#
This benchmark was designed by Dave May and this section was contributed by Cedric Thieulot.
The domain is a two-dimensional Cartesian box of size \(L\times L\). The velocity and pressure fields are given by
where \(p_0\) is a constant to be determined based on the type of pressure normalization. The viscosity is chosen to be
where \(\epsilon\) controls the viscosity contrast. It is easy to verify that the flow is incompressible as the velocity field satisfies \(\nabla\cdot \mathbf u = 0\). The right hand side term of the Stokes equation is obtained by inserting the expressions for velocity, pressure and viscosity in the momentum conservation equation, see Thieulot [2019] for details. The velocity, pressure and right hand side magnitude are shown in Fig. 166 for \(L=3\) and \(\epsilon=0.1\).
The \(p_0\) constant can be determined by requiring that the pressure is normalized over the volume of the domain:
It then follows that:
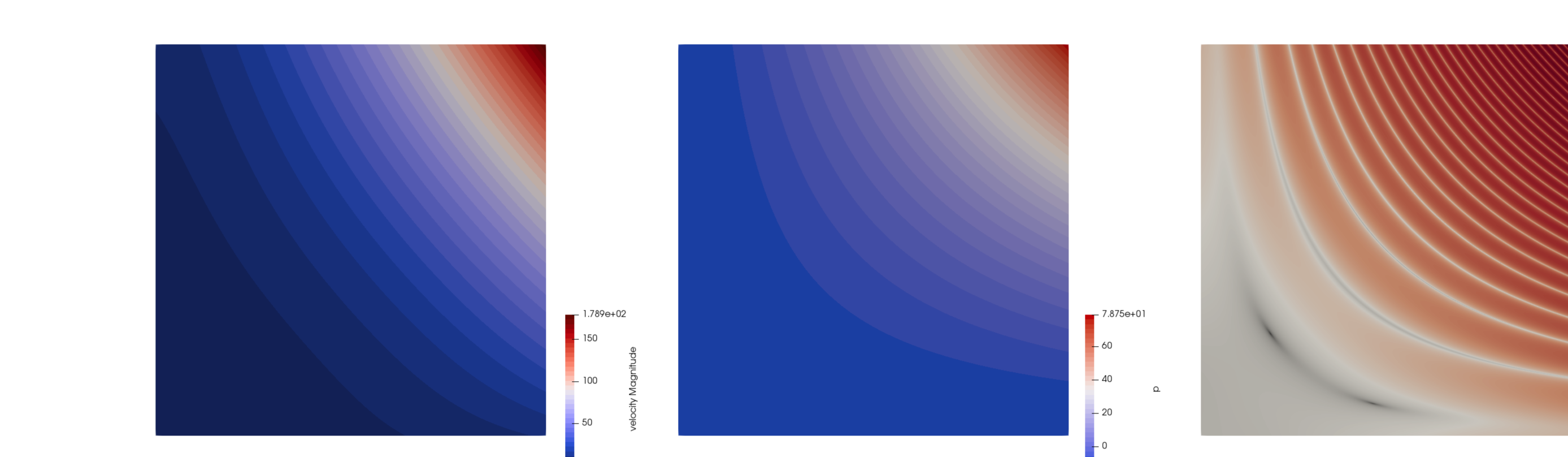
Fig. 166 Viscosity grooves benchmark: From left to right, velocity field, pressure field, and norm of the right hand side of the momentum equation, for a 3\times 3 domain with \epsilon=0.1.#
As seen in Fig. 167, the value of \(\epsilon\) controls the viscosity field amplitude: when the \(\sin\) term of the viscosity takes value 1, the viscosity is then equal to \(\epsilon\); when the \(\sin\) is equal to \(-1\), the viscosity is then \(2+\epsilon\). In other words, the ratio between maximal and minimal viscosity in the domain is of the order \(\frac{2}{\epsilon}\).
Another interesting aspect of this benchmark is the fact that increasing the domain size adds complexity to it as it increases the number of low viscosity zones and the spacing between them decreases.
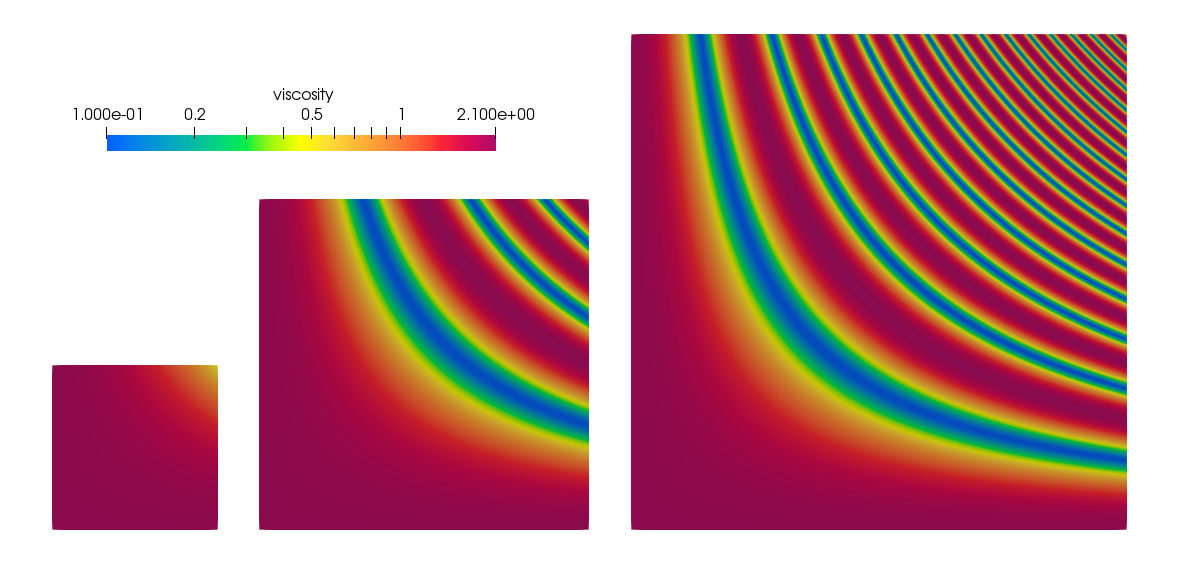
Fig. 167 Viscosity grooves benchmark: Viscosity field for three domain sizes: 1\times 1, 2\times 2 and 3\times 3.#
The velocity and pressure errors (in the \(L_2\) norm) are measured for \(L=1,2,3\), global refinement levels 3 to 9 (resolutions \(8\times 8\) to \(512\times 512\)) and \(\epsilon=10^{-1},10^{-2},10^{-3}\). Fig. 168 shows the velocity and pressure error convergence as a function of the mesh size for \(\epsilon=0.1\) (results are identical for the other two \(\epsilon\) values). The expected convergence rates (cubic convergence for velocity and quadratic for pressure) are recovered for the \(1\times 1\) domain at all resolutions. These rates are recovered for the \(2\times 2\) domain for resolutions above level 6. We find that the multitude of low viscosity bands in the upper right corner of the \(3\times 3\) domain will require a refinement level larger than 9 to recover the optimal convergence rates.

Fig. 168 Viscosity grooves benchmark: Velocity and pressure error convergence as a function of the mesh size h for 3 domain sizes.#